

Yogyakarta, 26 Mei 2025 – Mahasiswa Program Studi Sarjana Elektronika dan Instrumentasi (Elins), Departemen Ilmu Komputer dan Elektronika (DIKE), FMIPA UGM, berhasil mengembangkan prototipe kursi roda pintar yang mampu bergerak secara otonom dan menghindari tabrakan secara real-time di lingkungan dalam ruang. Teknologi ini dirancang untuk mendukung mobilitas penyandang disabilitas dan lansia secara lebih aman, efisien, dan mandiri.
Proyek ini dikerjakan oleh Rafael Andika Radya Hadi Kusuma di bawah bimbingan Dr. Andi Dharmawan, Oskar Natan, Ph.D., dan Wahyono, Ph.D., serta didukung oleh beberapa mahasiswa lain dari Elins DIKE UGM. Kursi roda pintar ini memanfaatkan integrasi teknologi Simultaneous Localization and Mapping (SLAM) dan deteksi objek berbasis deep learning menggunakan algoritma YOLO versi 8 (YOLOv8).
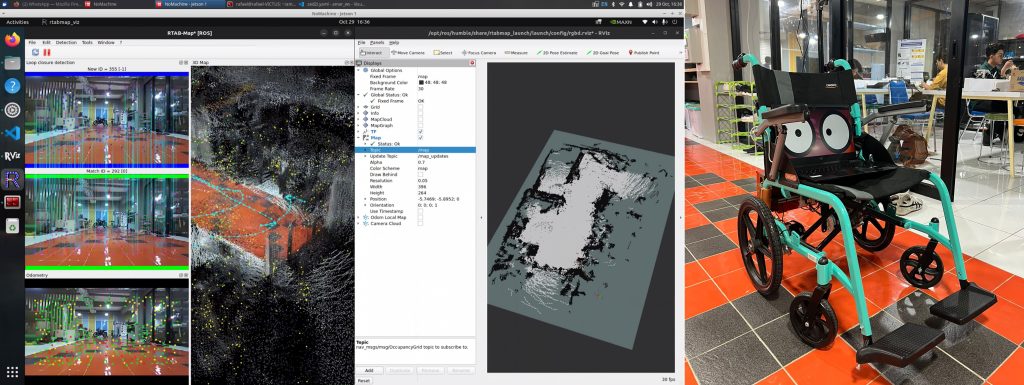
Sistem ini dilengkapi dengan sensor RPLiDAR A1M8 untuk pemetaan dua dimensi (2D) lingkungan sekitar dan kamera Intel RealSense D435i untuk mengidentifikasi objek statis maupun dinamis. Tidak seperti pendekatan konvensional yang masih mengandalkan encoder roda, sistem ini menggunakan metode encoder-free Lidar-Inertial Odometry (LIO), yang tidak hanya menyederhanakan perangkat keras, tetapi juga meningkatkan ketahanan terhadap kesalahan pembacaan sensor.
Dr. Andi Dharmawan, salah satu dosen pembimbing, menyampaikan bahwa inovasi ini menunjukkan potensi besar dalam pemanfaatan teknologi sistem tertanam dan kecerdasan buatan untuk kebutuhan sosial. “Kami mendorong mahasiswa untuk tidak hanya mengejar keberhasilan teknis, tetapi juga memiliki manfaat untuk masyarakat. Proyek ini adalah contoh baik bagaimana solusi teknologi dapat menyentuh langsung isu-isu kemanusiaan, seperti aksesibilitas dan kemandirian penyandang disabilitas,” ujarnya.
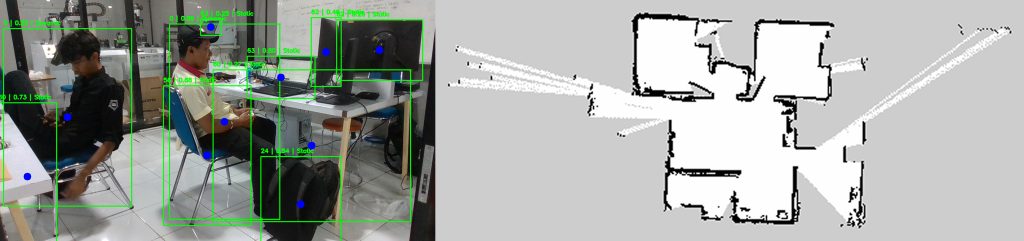
Berdasarkan hasil pengujian, sistem ini mampu menghasilkan peta lingkungan dengan akurasi tinggi (nilai SSIM mencapai 0.8778) serta mendeteksi objek dengan tingkat presisi memadai (mAP 84.4%). Pada skenario pengujian di lingkungan dalam ruang, kursi roda ini menunjukkan performa andal baik di area tanpa hambatan, dengan hambatan statis, maupun saat menghadapi objek dinamis yang bergerak.
Selain menghentikan pergerakan secara otomatis ketika mendeteksi objek penghalang, sistem juga mampu memperbarui peta secara real-time untuk merespons perubahan lingkungan. Kemampuan ini penting untuk memastikan navigasi yang adaptif dan aman di ruang-ruang publik seperti rumah sakit, pusat rehabilitasi, maupun fasilitas pelayanan lansia.
Karya inovatif ini menjadi bukti bahwa mahasiswa Elins DIKE FMIPA UGM memiliki kemampuan unggul dalam pengembangan teknologi robotika yang aplikatif dan berdampak luas. Ke depannya, sistem ini masih dapat dikembangkan lebih lanjut, salah satunya dengan menambahkan kemampuan prediksi pergerakan objek dinamis serta peningkatan kemampuan adaptasi pada kondisi pencahayaan yang beragam.
Proyek inovasi kursi roda pintar ini sejalan dengan upaya pencapaian Tujuan Pembangunan Berkelanjutan (SDGs), khususnya SDG 3 (Kehidupan Sehat dan Kesejahteraan), SDG 9 (Industri, Inovasi, dan Infrastruktur), serta SDG 10 (Berkurangnya Kesenjangan). Melalui integrasi teknologi cerdas untuk mendukung mobilitas penyandang disabilitas dan lansia, dan juga menunjukkan kemajuan dalam bidang rekayasa dan sistem tertanam.
Author: Andi Dharmawan
Editor: Marina
#SDGs3 #SDGs9 #SDGs10
