
Yogyakarta, 6 Juni 2026 – Dosen sekaligus Ketua Program Studi Magister Elektronika dan Instrumentasi (MEI), Departemen Ilmu Komputer dan Elektronika (DIKE) FMIPA UGM, Dr. Andi Dharmawan, S.Si., M.Cs., mengembangkan sistem kendali untuk meningkatkan akurasi dan stabilitas gerak loitering pada fixed-wing Unmanned Aerial Vehicle (UAV). Hasil penelitian tersebut dipublikasikan pada jurnal ICIC Express Letters, Part B: Applications Volume 16 Nomor 12 edisi Desember 2025 dengan judul “Cross-Track Error-Based Loitering Control System for Fixed-Wing Unmanned Aerial Vehicle” yang terindeks Scopus Q4.
Penulisan artikel ini melibatkan kolaborasi para peneliti dari Laboratorium Sistem Tertanam dan Robotika (STR) DIKE UGM, yakni Prof. Dr. Ir. Jazi Eko Istiyanto, M.Sc., IPU, ASEAN Eng., Oskar Natan, S.ST., M.Tr.T., Ph.D. selaku Sekretaris Departemen, dan Dr.techn. Aufaclav Zatu Kusuma Frisky, S.Si., M.Sc. selaku Ketua Program Studi Sarjana Elektronika dan Instrumentasi. Riset ini juga melibatkan Dr. Danang Lelono, Triyogatama Wahyu Widodo, serta Ariesta Martiningtyas Handayani dari Departemen Teknik Elektro dan Informatika Sekolah Vokasi UGM.
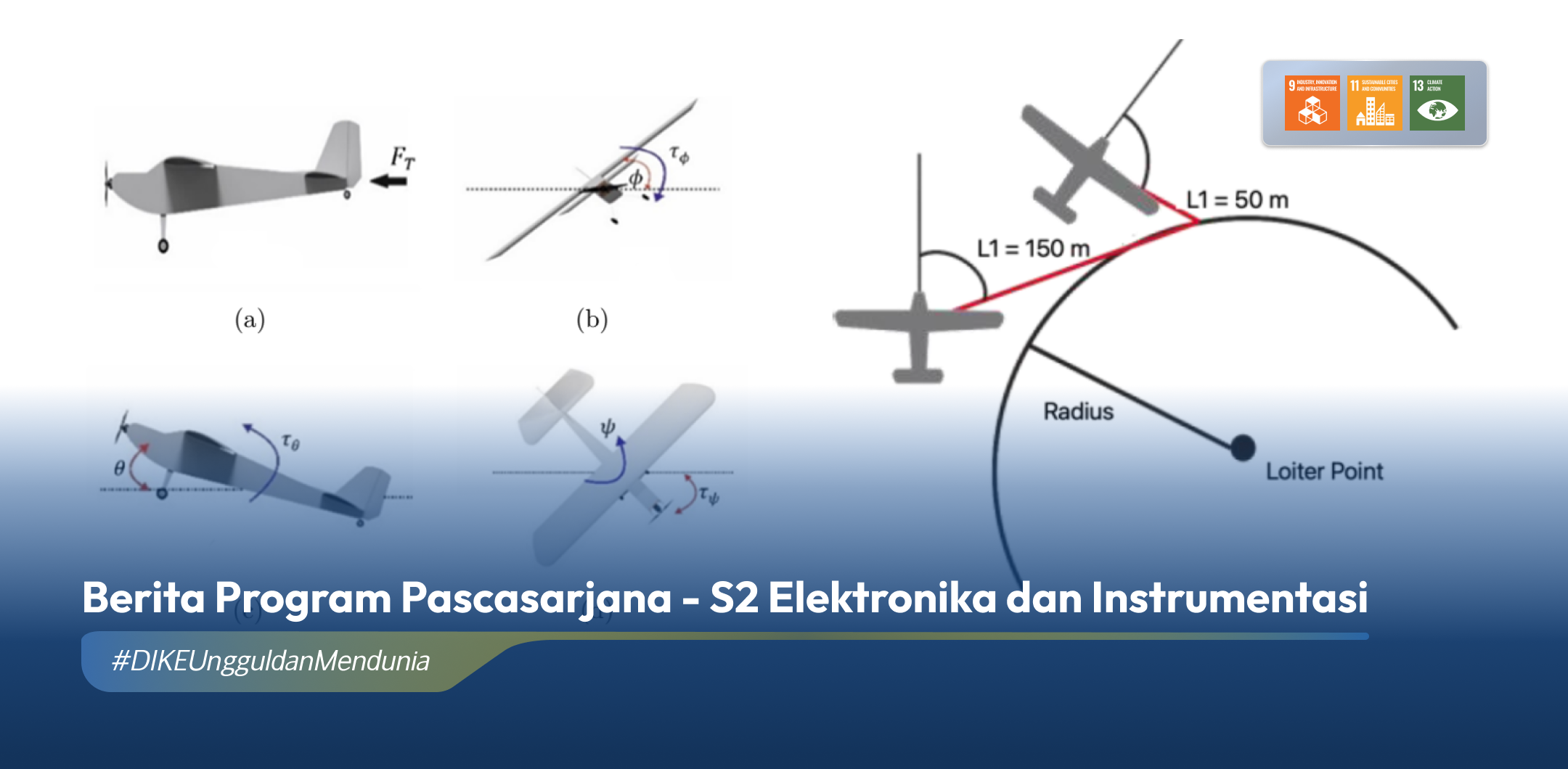
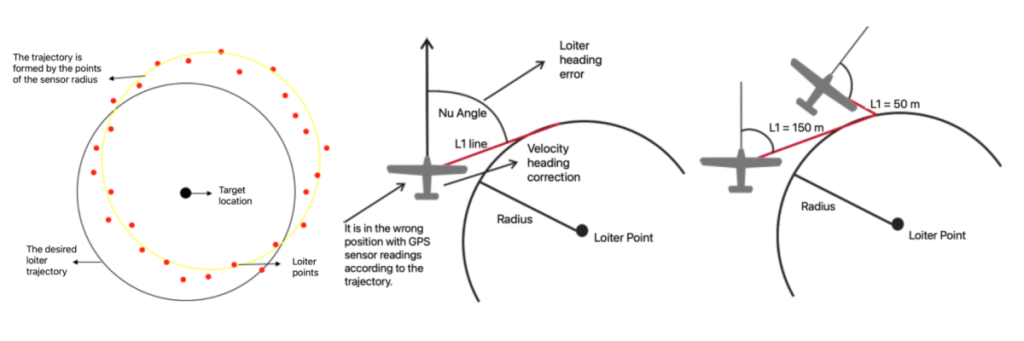
Penelitian ini berfokus pada pengembangan sistem kendali berbasis cross-track error untuk menjaga UAV sayap tetap agar mampu terbang melingkar (loitering) di sekitar titik tertentu. Kemampuan ini merupakan fase ketika pesawat tanpa awak mempertahankan posisi atau lintasan tertentu, misalnya untuk kebutuhan pemantauan, pengawasan wilayah, pemetaan, pengumpulan data udara, hingga pola tunggu sebelum pendaratan. Guna mengatasi tantangan deviasi lintasan akibat kesalahan GPS maupun gangguan angin, tim peneliti mengintegrasikan dua pendekatan kendali secara bersamaan. Linear Quadratic Regulator (LQR) digunakan untuk menstabilkan gerak rotasi sikap UAV (roll, pitch, dan yaw), sedangkan L1 controller menghasilkan perintah percepatan lateral yang kemudian diterjemahkan menjadi referensi sudut roll dan yaw. Penggabungan arsitektur ini memungkinkan UAV tidak hanya mampu menjaga orientasi terbang, tetapi juga dapat melakukan koreksi lintasan berdasarkan kesalahan posisi terhadap jalur melingkar yang ditargetkan secara real-time.
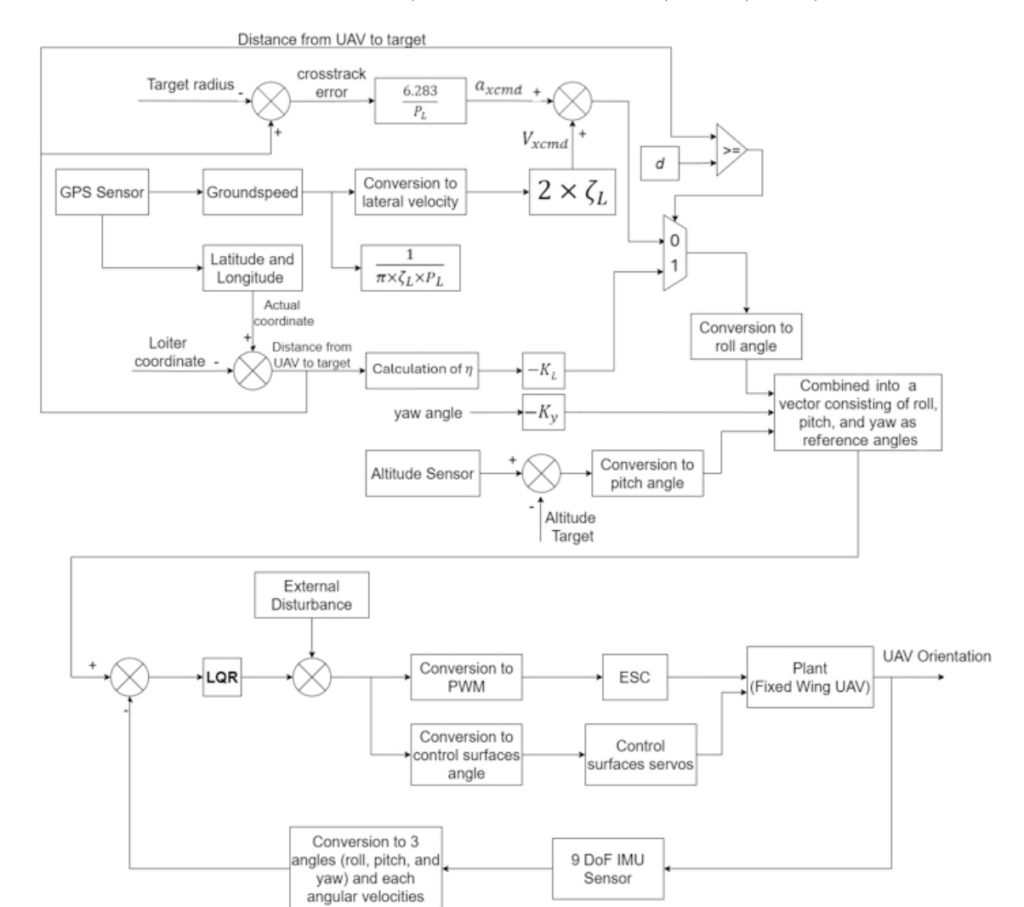
Hasil pengujian membuktikan bahwa sistem kendali yang dikembangkan mampu mempertahankan UAV pada radius loitering 90 meter dengan rata-rata deviasi lintasan sekitar 9 meter. Pengaturan parameter terbaik diperoleh pada L1 damping 0,85 dan L1 period 14, sehingga UAV dapat mempertahankan lintasan tanpa overshoot yang signifikan. Dari sisi stabilisasi terbang, sistem LQR sukses menjaga kestabilan gerak roll, pitch, dan yaw dengan nilai kesalahan steady-state berturut-turut sebesar 2,58 derajat, 0,76 derajat, dan 2,93 derajat. Angka kesalahan tersebut tetap berada dalam batas toleransi operasional, meskipun terdapat pengaruh gangguan eksternal seperti angin, medan magnet sensor kompas, serta keterbatasan aktuator.
Riset pengembangan teknologi UAV dengan potensi penerapan untuk pemantauan wilayah, pengawasan lingkungan, pertanian presisi, pemetaan area, observasi kebencanaan, dan misi holding pattern ini turut mendukung pencapaian Tujuan Pembangunan Berkelanjutan (SDGs). Inovasi pada sistem kendali UAV dan robotika ini merupakan wujud dukungan langsung terhadap capaian SDG 9 (Industri, Inovasi, dan Infrastruktur). Potensi penerapan teknologi untuk pemantauan wilayah dan dukungan sistem tanggap bencana sejalan dengan SDG 11 (Kota dan Pemukiman yang Berkelanjutan), sekaligus menunjang SDG 13 (Penanganan Perubahan Iklim) melalui optimalisasi pengamatan lingkungan dan mitigasi risiko bencana. Melalui inovasi dan capaian publikasi pada jurnal terindeks Scopus Q4 ini, Program Studi MEI berkolaborasi dengan Laboratorium STR DIKE UGM berkomitmen untuk terus mendorong riset teknologi sistem kendali cerdas guna memberikan kontribusi nyata bagi kemajuan riset robotika dan kemandirian teknologi nasional.
Author : Andi Dharmawan
Editor : Faiz Anggoro
#SDGs9 #SDGs11 #SDGs13



