

Yogyakarta, 7 Juni 2026 – Prestasi akademik di bidang pengembangan teknologi kecerdasan artifisial untuk kendaraan otonom kembali ditorehkan melalui publikasi ilmiah pada jurnal internasional bereputasi. Novelio Putra Indarto, mahasiswa Program Studi Magister Elektronika dan Instrumentasi (MEI), Departemen Ilmu Komputer dan Elektronika (DIKE) FMIPA UGM, mempublikasikan riset terkait segmentasi cerdas untuk sistem persepsi kendaraan otonom. Artikel ilmiah berjudul “Edge-aware distilled segmentation with pseudo-label refinement for autonomous driving perception” tersebut diterbitkan pada jurnal internasional terindeks Scopus Q3, IAES International Journal of Robotics and Automation (IJRA) Volume 14 Nomor 4 edisi Desember 2025.
Capaian ini merupakan hasil dari kerja sama akademik antara Novelio dengan para dosen dan peneliti dari Laboratorium Sistem Tertanam dan Robotika (STR) DIKE UGM, yakni Oskar Natan, S.ST., M.Tr.T., Ph.D. selaku Sekretaris Departemen yang bertindak sebagai corresponding author, serta Dr. Andi Dharmawan, S.Si., M.Cs. selaku Ketua Program Studi MEI. Riset ini dilatarbelakangi oleh tingginya kebutuhan teknologi semantic segmentation untuk membangun sistem persepsi kendaraan otonom yang efisien. Teknologi tersebut memungkinkan sistem persepsi memahami lingkungan sekitar secara lebih detail, misalnya membedakan jalan, kendaraan, pejalan kaki, bangunan, dan objek lain pada citra jalan raya. Namun, model deep learning berakurasi tinggi umumnya menuntut sumber daya komputasi besar, sehingga tidak selalu cocok diterapkan pada perangkat terbatas seperti embedded system, perangkat edge, atau sistem komputasi berdaya rendah. Menjawab tantangan tersebut, penelitian ini merumuskan kerangka kerja segmentasi yang lebih ringan, efisien, dan sesuai untuk implementasi pada perangkat dengan keterbatasan sumber daya.
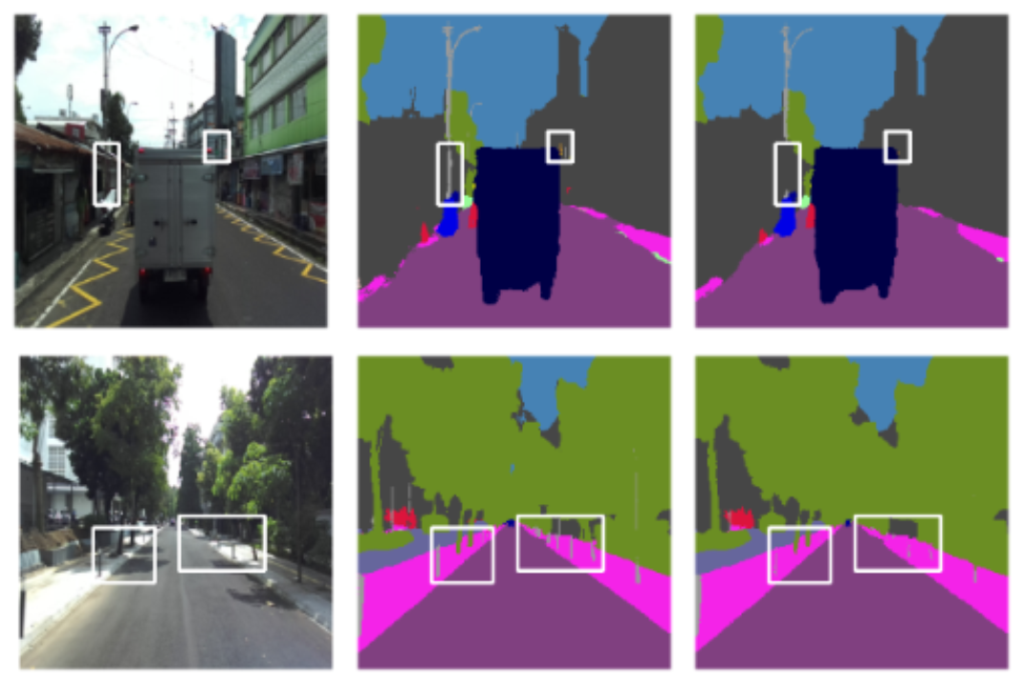
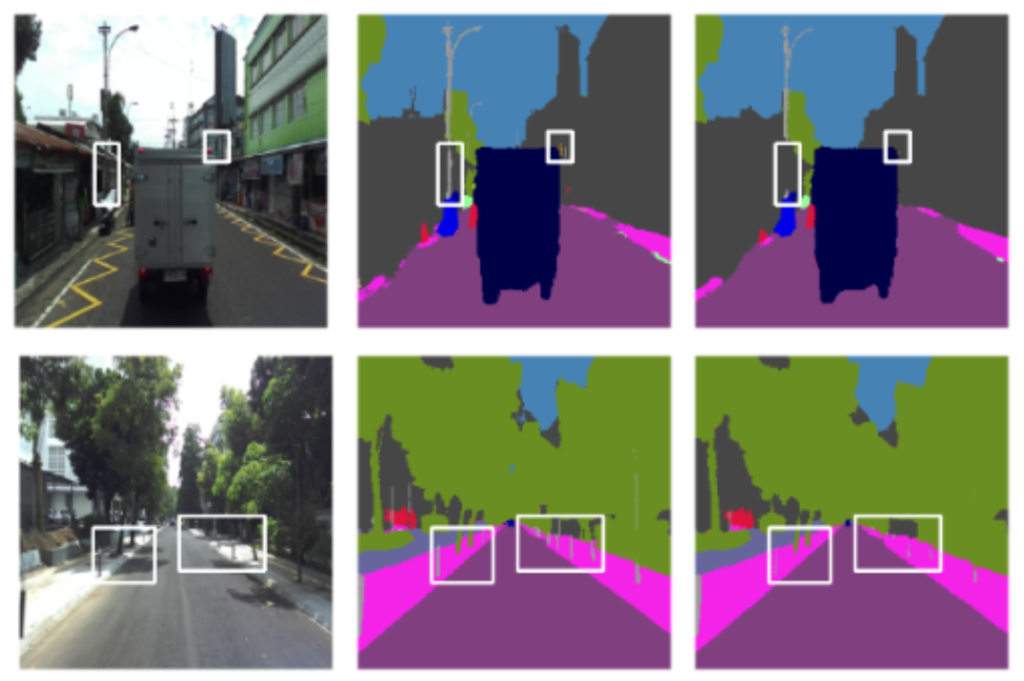
Metode yang dikembangkan menggabungkan tiga pendekatan utama, yaitu pseudo-label refinement, knowledge distillation, dan entropy-based confidence masking. Pada tahap awal, model teacher berbasis SegFormer-B5 digunakan untuk menghasilkan pseudo-label dari data citra tanpa anotasi manual, yang kemudian disempurnakan menggunakan DenseCRF agar batas objek lebih rapi dan konsisten secara spasial. Selanjutnya, mekanisme entropy-based masking diterapkan guna menyaring area prediksi yang kurang meyakinkan. Melalui tahapan ini, model student berbasis EfficientNet dengan arsitektur decoder bergaya U-Net dapat menyerap pembelajaran dari label yang andal sehingga model tetap ringan tetapi mampu menghasilkan segmentasi yang cukup akurat.
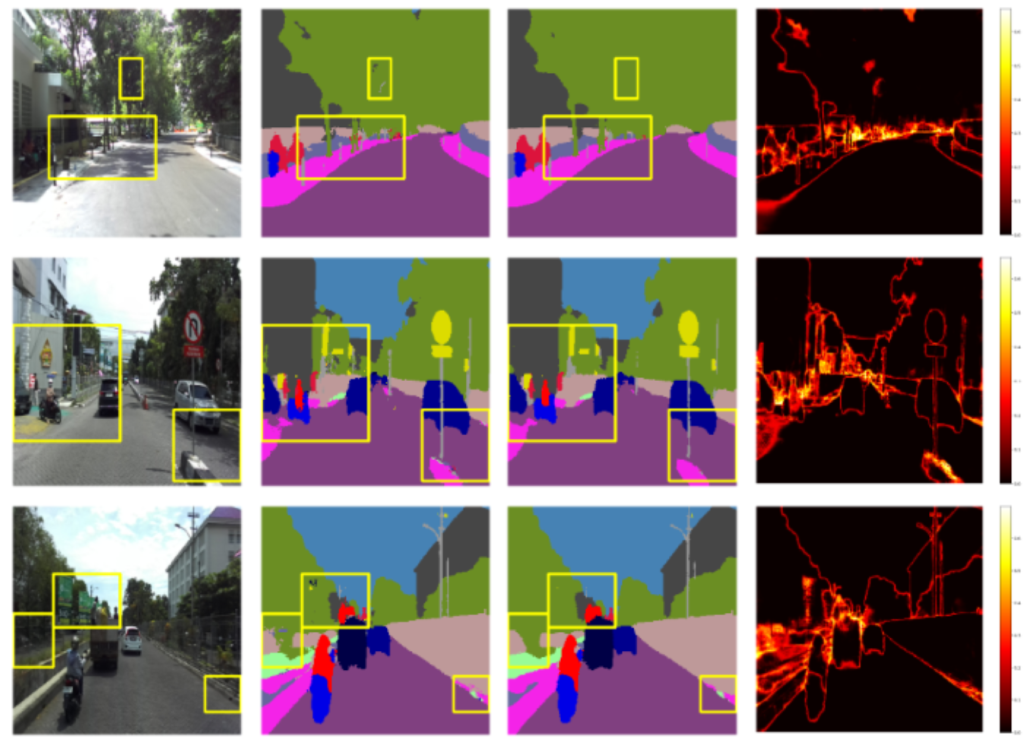
Hasil eksperimen membuktikan bahwa proses penyempurnaan pseudo-label ini mampu meningkatkan performa semantic segmentation secara signifikan, di mana varian EfficientNet-B7 mencatatkan performa terbaik dengan skor mIoU mencapai 83,21% dan skor F1 sebesar 90,76%. Penerapan knowledge distillation dan entropy-based masking juga terbukti membantu meningkatkan akurasi, terutama pada model berukuran kecil hingga menengah yang lebih rentan terhadap noise pada pseudo-label. Dari segi kesiapan implementasi perangkat keras, model EfficientNet-B0 sukses mencapai kecepatan pemrosesan 15,66 FPS pada satu core CPU dan meningkat hingga 42,04 FPS pada empat core CPU. Kecepatan ini menunjukkan bahwa model ringan yang dikembangkan berpotensi digunakan untuk aplikasi real-time atau near real-time pada sistem persepsi kendaraan otonom maupun perangkat robotika dengan keterbatasan komputasi. Kontribusi penelitian ini tidak hanya terletak pada peningkatan performa segmentasi, tetapi juga pada pendekatan yang lebih praktis untuk mengurangi ketergantungan terhadap anotasi manual. Dengan memanfaatkan pseudo-label dan knowledge distillation, sistem dapat dilatih secara lebih efisien menggunakan data tanpa anotasi penuh. Pendekatan ini penting karena pembuatan anotasi piksel untuk semantic segmentation biasanya membutuhkan waktu, biaya, dan tenaga yang besar.
Keberhasilan dalam menghadirkan efisiensi komputasi pada teknologi persepsi kendaraan otonom ini sejalan dengan pencapaian Tujuan Pembangunan Berkelanjutan (SDGs). Pengembangan sistem komputasi edge dan inovasi robotika yang lebih ringan tersebut merupakan bentuk implementasi SDG 9 (Industri, Inovasi, dan Infrastruktur). Pemanfaatan teknologi persepsi cerdas ini sejalan dengan SDG 11 (Kota dan Pemukiman yang Berkelanjutan) melalui dorongan ekosistem transportasi masa depan yang adaptif, aman, dan berprinsip hemat energi komputasi. Keberhasilan kolaborasi riset yang dipublikasikan pada jurnal terindeks Scopus Q3 ini mempertegas komitmen DIKE UGM dalam memperkuat ekosistem penelitian kecerdasan buatan guna menghadirkan solusi komputasi yang aplikatif dan berdampak luas.
Author : Andi Dharmawan
Editor : Faiz Anggoro
#SDGs9 #SDGs11



