

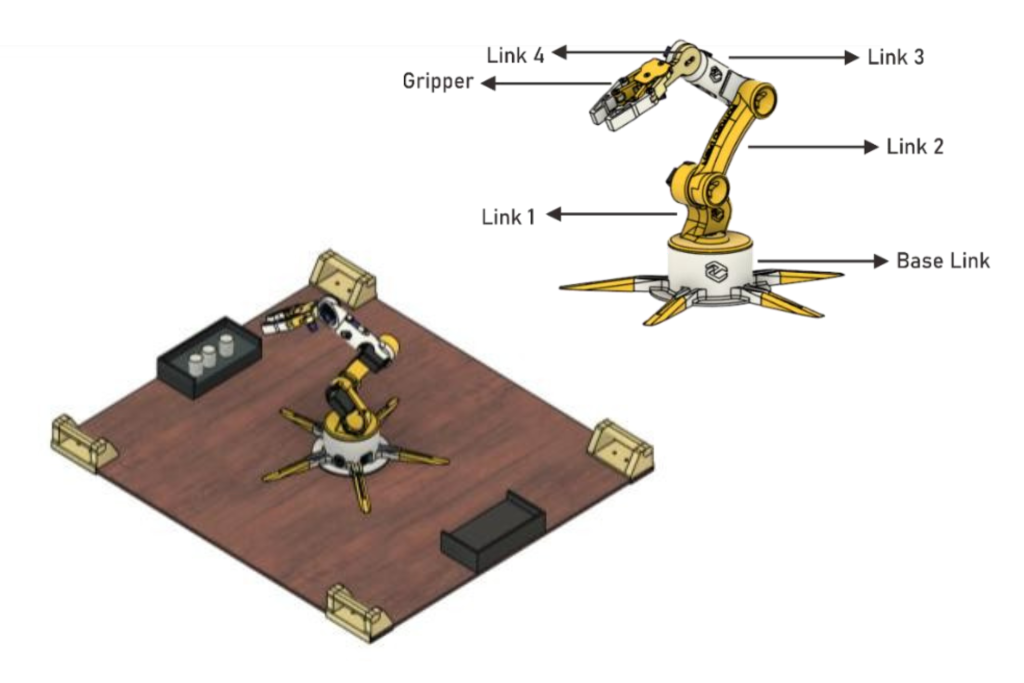
Yogyakarta, 20 Mei 2026 – Mahasiswa Program Studi Magister Elektronika dan Instrumentasi (MEI), Departemen Ilmu Komputer dan Elektronika (DIKE) FMIPA UGM, Andara Dwi Hermawan, berhasil mengembangkan pendekatan kecerdasan artifisial (Artificial Intelligence/AI) untuk mengendalikan robot manipulator. Di bawah supervisi Aufaclav Zatu Kusuma Frisky dan Andi Dharmawan, penelitian ini merancang model AI guna meningkatkan akurasi serta efisiensi pergerakan robot enam derajat kebebasan (6-DOF) dalam tugas pick and place (ambil dan letak).

Dalam industri otomasi, robot manipulator 6-DOF banyak dimanfaatkan karena kemampuannya menjangkau berbagai posisi secara fleksibel. Namun, pengoperasian robot ini menghadapi tantangan komputasi pada proses inverse kinematics (IK), yaitu perhitungan sudut sendi agar ujung lengan robot (end-effector) mencapai koordinat yang ditargetkan. Selama ini, solver numerik konvensional yang digunakan industri terbukti lambat, sensitif terhadap inisialisasi awal, dan rentan tidak stabil saat mendekati batas ruang geraknya.
Dalam riset ini, tim peneliti mengembangkan sistem (pipeline) end-to-end berbasis Multi-Layer Perceptron (MLP) yang memetakan posisi end-effector dalam koordinat Kartesian (X, Y, Z) langsung ke konfigurasi sudut sendi robot. Dataset penelitian ini dikonstruksi melalui sampling grid Kartesian beresolusi 1 mm di seluruh ruang kerja robot berdasarkan pemodelan Unified Robot Description Format (URDF), yang menghasilkan lebih dari 60 juta titik target. Dari jumlah tersebut, diekstraksi sekitar 34,4 juta konfigurasi sendi valid berdasarkan batasan fisik sendinya. Data masif ini kemudian digunakan untuk melatih arsitektur ResMLPBound, sebuah jaringan saraf residual dengan lapisan keluaran berbatas yang menjamin prediksi sudut sendi selalu berada dalam rentang fisik yang telah didefinisikan oleh URDF robot.
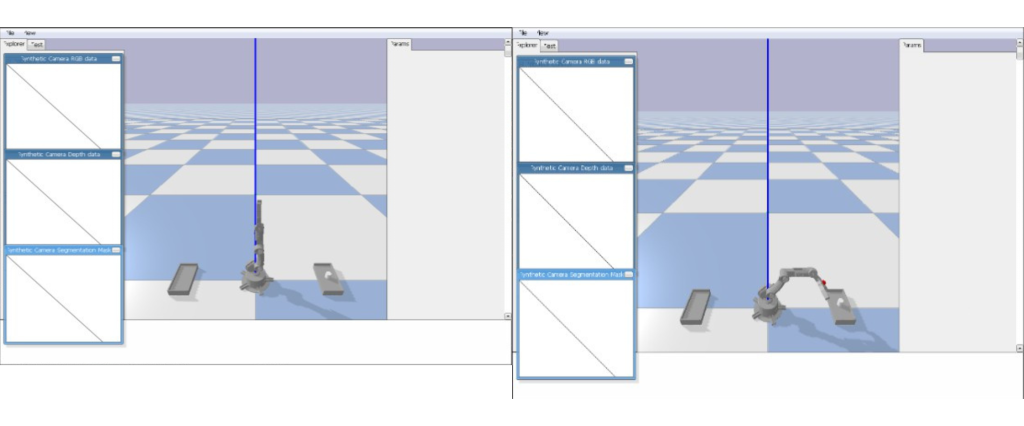
Model ini dievaluasi melalui pengujian titik end-effector dan eksekusi trajektori pick and place penuh di simulasi lingkungan PyBullet maupun pengujian langsung pada robot fisik. Hasilnya menunjukkan keunggulan signifikan di seluruh metrik evaluasi jika dibandingkan dengan baseline metode numerik Jacobian-based IKPy (warm-start). Kinerja model tercatat paling optimal saat beroperasi di inti ruang kerja. Selain itu, formulasi lapisan keluaran berbatas (bounded output) pada model memastikan tidak ada pelanggaran batas sendi selama pergerakan, sebuah parameter fundamental untuk menjamin keamanan operasional robot di lingkungan industri nyata.
Pendekatan MLP-based inverse kinematics ini menawarkan keseimbangan yang pas antara akurasi, stabilitas, dan efisiensi komputasi untuk aplikasi pick and place secara real-time, menjadikannya kandidat kuat untuk menggantikan solver numerik konvensional dalam sistem robotika modern. Inovasi riset ini telah dipublikasikan pada International Journal of Robotics and Control Systems (IJRCS) Volume 6, Nomor 2, Tahun 2026, sebuah jurnal bereputasi internasional terindeks global yang berada pada peringkat Q3 Scimago Journal Rank (SJR 0,31). Penelitian ini turut didukung oleh fasilitas dana publikasi dari DIKE UGM Tahun 2026.
Pengembangan pemodelan AI ini menjadi wujud kontribusi riset sivitas akademika DIKE UGM dalam menghadirkan solusi teknologi yang selaras dengan agenda Tujuan Pembangunan Berkelanjutan (SDGs). Dorongan peningkatan produktivitas melalui otomasi cerdas ini secara langsung berkontribusi pada pemenuhan SDG 8 (Pekerjaan Layak dan Pertumbuhan Ekonomi). Sejalan dengan hal tersebut, keberhasilan riset ini juga memperkuat ekosistem otomasi industri yang lebih efisien dan andal sebagai wujud nyata penerapan SDG 9 (Industri, Inovasi, dan Infrastruktur). Melalui capaian ini, kegiatan penelitian mahasiswa di lingkungan DIKE UGM diharapkan dapat terus menghasilkan inovasi aplikatif yang berdampak positif bagi kemajuan teknologi.
Author : Andara Dwi Hermawan, Aufaclav Zatu Kusuma Frisky, Andi Dharmawan
Editor : Faiz Anggoro
#SDGs8 #SDGs9



