

Yogyakarta, 8 April 2026 – Perkembangan robot humanoid (menyerupai manusia) terus menunjukkan kemajuan pesat, khususnya dalam interaksi secara langsung di lingkungan yang dirancang untuk manusia. Namun, menjaga keseimbangan robot saat berjalan di permukaan tidak rata atau saat berhenti mendadak (sudden stop) masih menjadi tantangan utama dalam pengoperasiannya. Berangkat dari permasalahan tersebut, tim peneliti dari Program Studi Magister Elektronika dan Instrumentasi (MEI), Departemen Ilmu Komputer dan Elektronika (DIKE) FMIPA UGM berhasil mengembangkan inovasi sistem kendali adaptif yang mampu memastikan titik pusat massa atau Center of Mass (CoM) robot tetap stabil sehingga terhindar dari risiko jatuh pada kondisi dinamis.
Tim peneliti yang beranggotakan Andi Dharmawan, Jazi Eko Istiyanto, Bakhtiar Alldino Ardi Sumbodo, Muhammad Auzan, dan Oskar Natan ini telah memublikasikan riset tersebut pada jurnal internasional IIUM Engineering Journal (terindeks Scopus Q3). Pencapaian ini merupakan wujud penguatan ekosistem akademik. Keterlibatan para peneliti ini memberikan arah dalam menyelaraskan riset dengan kurikulum di Program Studi MEI.

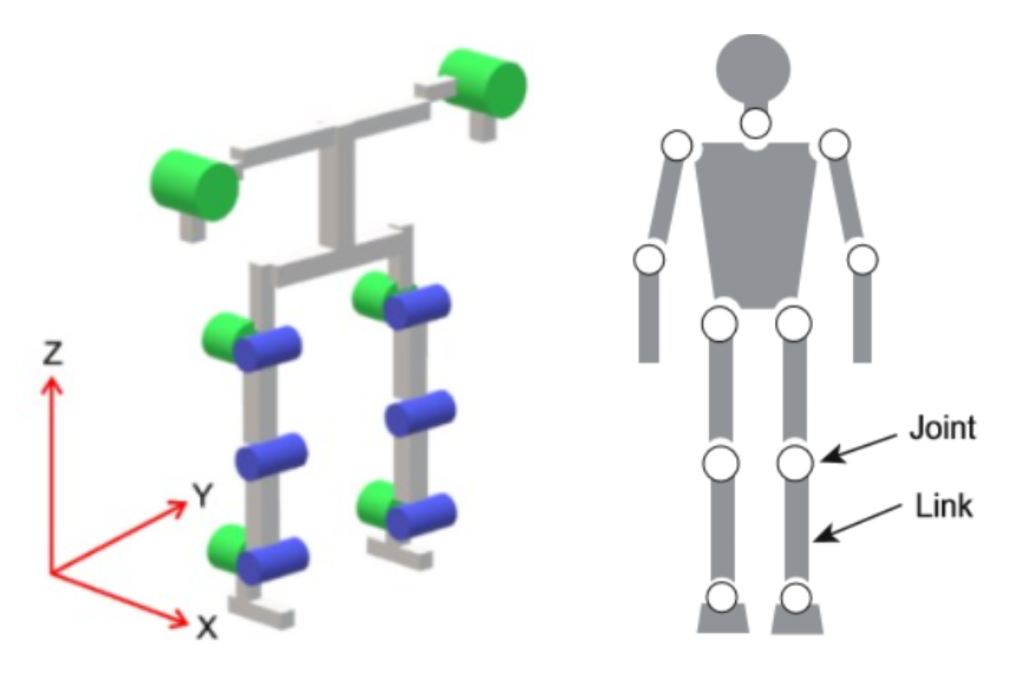
Selain memperkuat sistem kendali keseimbangan, penelitian ini juga mengembangkan pola berjalan robot menggunakan pendekatan Preview Control berbasis Zero Moment Point (ZMP). Metode ini berfungsi menghasilkan lintasan gerakan CoM yang stabil dengan memastikan proyeksi CoM selalu berada di dalam area pijakan tumpuan (support polygon). Pola pergerakan yang telah direncanakan tersebut kemudian dieksekusi melalui perhitungan forward kinematics dan inverse kinematics, sehingga setiap langkah kaki robot dapat mengikuti lintasan secara presisi tanpa kehilangan keseimbangan.
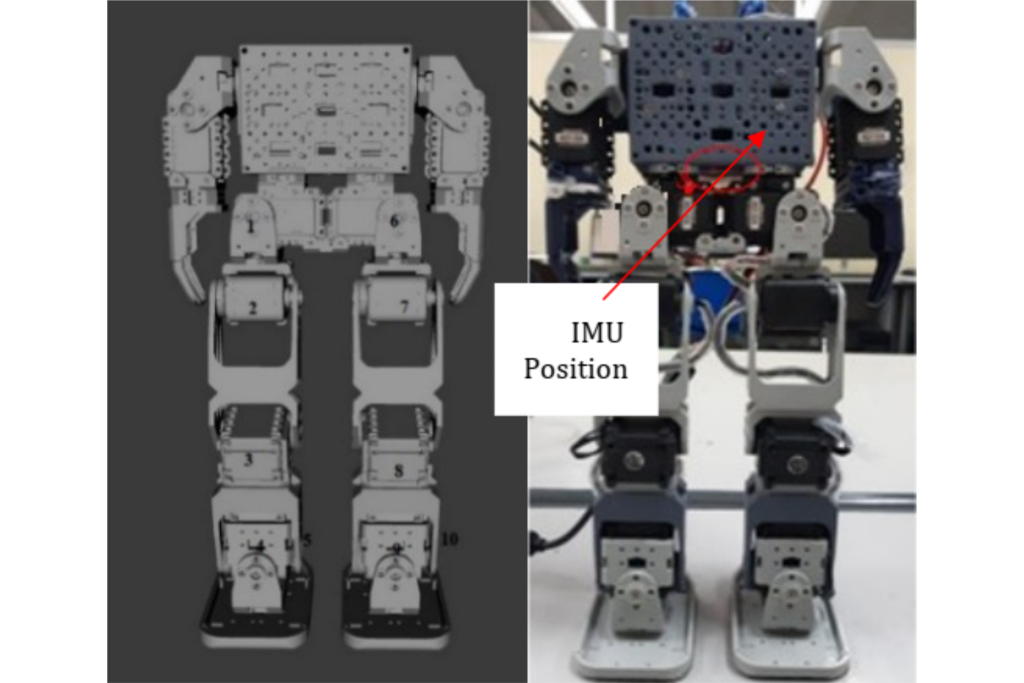
Keunggulan riset ini diperkuat melalui metode pengujiannya yang dilakukan langsung pada robot humanoid fisik, bukan sekadar simulasi komputer. Dengan demikian, hasil yang diperoleh merepresentasikan kondisi nyata yang mencakup gangguan seperti noise sensor, delay aktuator, dan keterbatasan mekanis. Berdasarkan hasil pengujian, robot mampu berjalan stabil pada permukaan datar dengan menjaga posisi CoM tetap di dalam batas support polygon. Saat diuji pada permukaan miring, pergeseran CoM membuat sistem kendali tanpa adaptasi fuzzy menjadi kurang responsif. Namun dengan integrasi fuzzy-LQR, robot mampu menyesuaikan parameter secara real-time guna mempertahankan stabilitas hingga kemiringan 10 derajat. Pada kondisi sudden stop, sistem juga mampu memulihkan titik CoM ke area tumpuan untuk mencegah robot terjatuh. Hal ini mengonfirmasi efektivitas kombinasi LQR dan logika fuzzy pada lingkungan yang dinamis, dengan efisiensi komputasi yang tetap memadai untuk implementasi pada sistem embedded.
Sinergi berkelanjutan antara riset Laboratorium STR dan aktivitas akademik ini membuktikan komitmen DIKE UGM dalam melahirkan inovasi yang unggul dan relevan dengan kebutuhan masa depan, sekaligus turut berkontribusi langsung pada pencapaian Tujuan Pembangunan Berkelanjutan (SDGs). Keterlibatan peneliti yang mengintegrasikan luaran riset ke dalam kurikulum pascasarjana S2 Elins turut memperkuat SDG 4 (Pendidikan Berkualitas). Manfaat dari ranah pendidikan tersebut berlanjut pada sektor ketenagakerjaan, di mana potensi pemanfaatan robot humanoid di lingkungan kerja berisiko tinggi sangat selaras dengan target SDG 8 (Pekerjaan Layak dan Pertumbuhan Ekonomi). Pada skala yang lebih luas, pengembangan teknologi robotika mutakhir dan sistem cerdas ini menjadi wujud nyata implementasi SDG 9 (Industri, Inovasi, dan Infrastruktur).
Author : Andi Dharmawan
Editor : Faiz Anggoro
#SDGs4 #SDGs8 #SDGs9



