
Yogyakarta, 11 Juni 2026 – Pengembangan teknologi kendali motor DC yang efisien kembali dicatatkan melalui publikasi ilmiah internasional. Mahasiswa Program Studi Magister Elektronika dan Instrumentasi (MEI), Departemen Ilmu Komputer dan Elektronika (DIKE) FMIPA UGM, Aulia Rasyid Pratama, memublikasikan riset terbarunya mengenai efisiensi metode kendali tersebut pada jurnal internasional bereputasi. Artikel ilmiah bertajuk “Resource-Efficient Model Predictive Control on a Low-End Field-Programmable Gate Array for DC Motor Speed Control” tersebut diterbitkan pada International Journal of Robotics and Control Systems (IJRCS) Volume 6 Nomor 2 edisi tahun 2026 yang terindeks Scopus Q2.
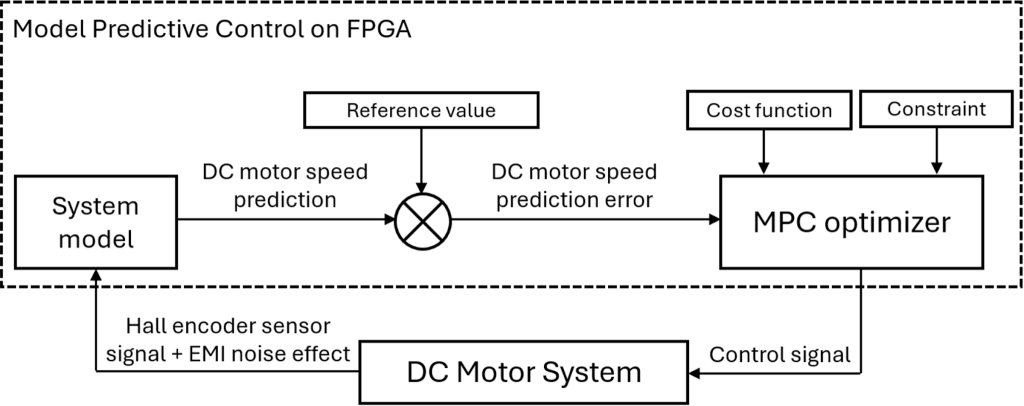
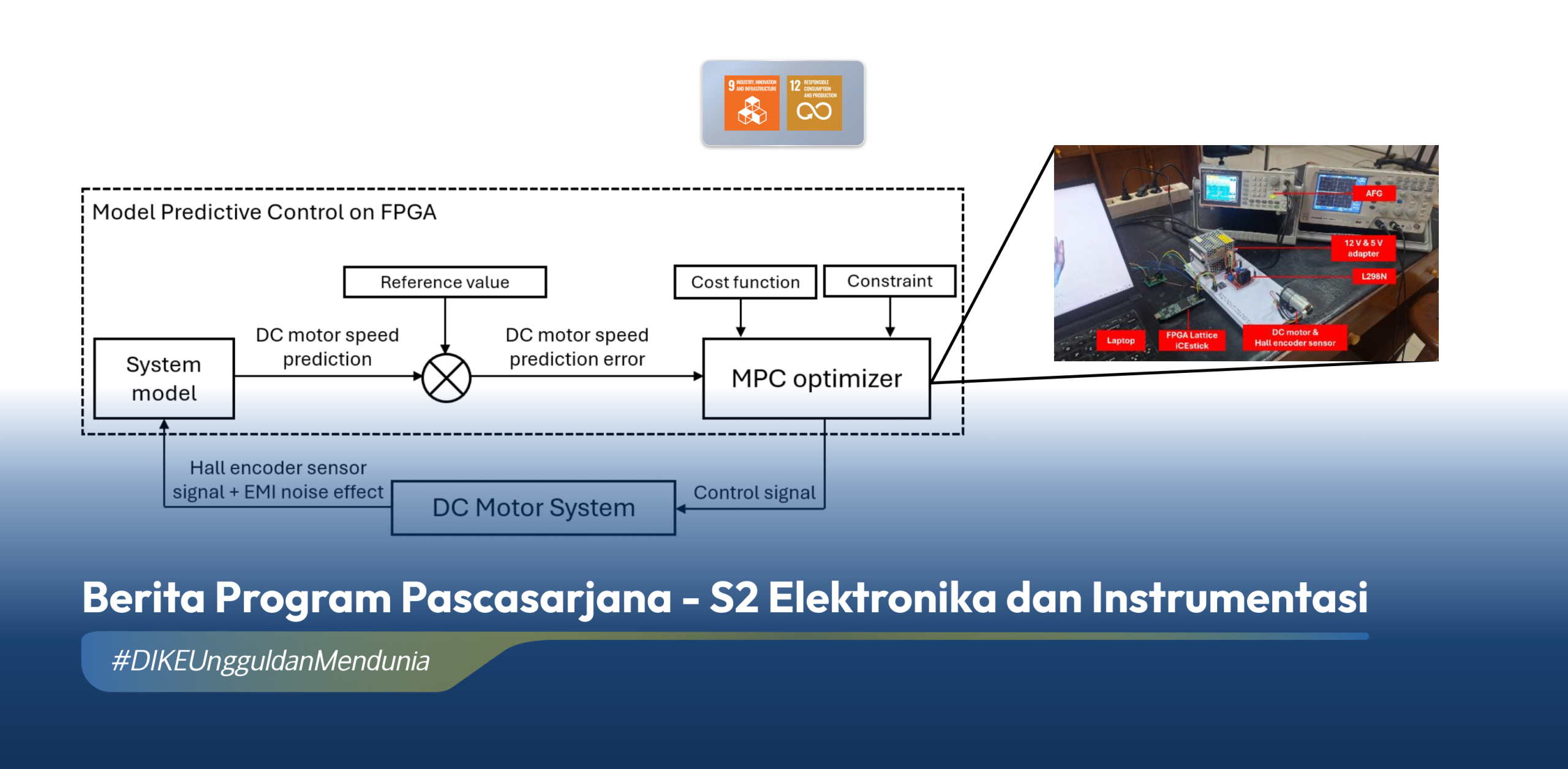
Publikasi ilmiah ini merupakan hasil kolaborasi riset Aulia dengan Kepala Laboratorium Sistem Tertanam dan Robotika (STR) DIKE UGM, Prof. Dr. Ir. Jazi Eko Istiyanto, M.Sc., IPU, ASEAN Eng., sebagai corresponding author, bersama Dr. Andi Dharmawan, S.Si., M.Cs. selaku Ketua Program Studi MEI. Penelitian ini mengangkat persoalan penting dalam implementasi Model Predictive Control (MPC) pada perangkat komputasi terbatas. MPC dikenal sebagai metode kendali modern yang mampu memprediksi perilaku sistem di masa depan berdasarkan model matematis, sehingga dapat menghasilkan aksi kendali yang optimal. Namun, metode ini umumnya membutuhkan komputasi yang cukup besar, sehingga implementasinya pada perangkat kecil dan murah seperti low-end FPGA menjadi tantangan tersendiri.
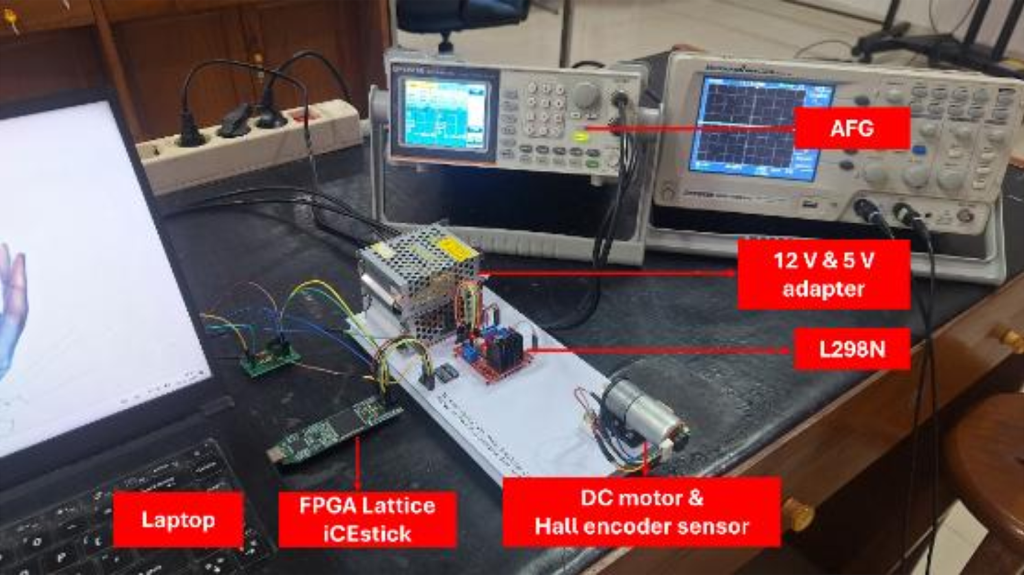
Tim peneliti mengembangkan arsitektur MPC hemat sumber daya yang diimplementasikan secara langsung pada Field-Programmable Gate Array (FPGA) kelas menengah-bawah, yakni Lattice iCE40HX1K. Perangkat ini tidak dibekali blok Digital Signal Processor (DSP) khusus, sehingga menuntut efisiensi logika yang ketat. Sistem kendali ini dirangkai menggunakan motor DC JGA25-370 berkecepatan 1360 RPM, hall encoder, driver motor L298N, logic level shifter, serta Arbitrary Function Generator (AFG) untuk menyimulasikan gangguan elektromagnetik atau false-edge pada umpan balik encoder. Rangkaian strategi optimasi diterapkan secara presisi, mulai dari representasi fixed-point 16-bit Q13.3, kalkulasi koefisien model di luar FPGA, substitusi operasi pembagian dengan perkalian resiprokal, penerapan horizon prediksi pendek, hingga penggunaan bobot penalti skalar guna menghindari operasi matriks yang berat.
Pengujian terhadap rancangan tersebut menunjukkan bahwa arsitektur MPC berhasil berjalan dalam batas sumber daya FPGA yang tersedia. Sistem mencatatkan pemanfaatan logic cell hingga 1.272 dari total 1.280 komponen yang tersedia, atau sekitar 99%, yang menunjukkan bahwa sistem bekerja hampir pada batas maksimum kapasitas perangkat. Meskipun demikian, sistem tetap mampu memenuhi kebutuhan real-time dengan waktu komputasi hanya sebesar 1,83 mikrodetik, jauh di bawah batas maksimum 1 milidetik yang ditetapkan dalam penelitian. Pada pengujian kendali motor DC dengan gangguan false-edge di frekuensi 2 kHz, 5 kHz, dan 10 kHz, sistem tetap menunjukkan akurasi steady-state di atas 98%. Kontribusi penelitian ini membuktikan bahwa MPC dapat diadaptasi untuk perangkat FPGA berbiaya rendah, membuka peluang luas bagi penerapan kendali MPC pada sistem gerak tertanam, penggerak motor industri berbiaya murah, dan otomasi terdistribusi yang menuntut respons cepat.
Capaian publikasi pada jurnal terindeks Scopus Q2 ini menjadi bukti kontribusi dan dukungan Program Studi MEI DIKE UGM dalam riset kendali modern, sistem tertanam, dan robotika yang selaras dengan Tujuan Pembangunan Berkelanjutan (SDGs). Pengembangan sistem otomasi industri yang efisien dan terjangkau merupakan wujud nyata implementasi SDG 9 (Industri, Inovasi, dan Infrastruktur). Pendekatan komputasi hemat sumber daya turut merepresentasikan prinsip SDG 12 (Konsumsi dan Produksi yang Bertanggung Jawab) dengan mendorong pemanfaatan perangkat keras rendah daya dan berbiaya minim tanpa mengorbankan performa kendali. DIKE UGM terus mendorong penelitian berkualitas internasional pada inovasi teknologi sistem tertanam dan robotika untuk menjawab kebutuhan otomasi industri masa depan.
Author : Andi Dharmawan
Editor : Faiz Anggoro
#SDGs9 #SDGs12



